
2
2
Slam入門 ロボットの自己位置推定と地図構築の技術 友納 正裕 本 通販 Amazon
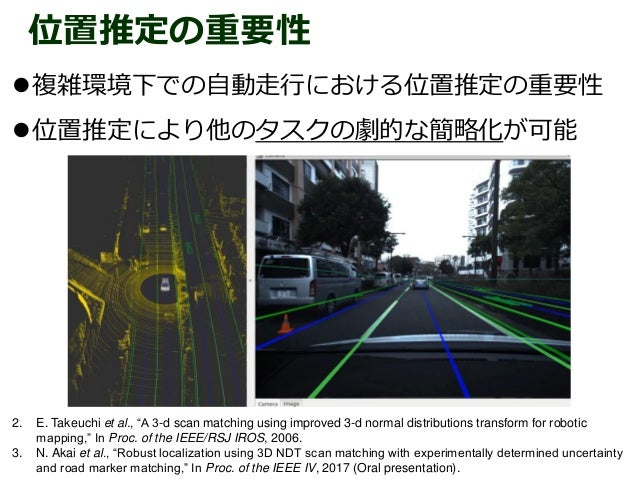
完全自動運転実現のための信頼度付き自己位置推定の提案
2
2
研究紹介 自動運転の自己位置推定とデジタル地図に関する研究 上條俊介准教授 東京大学大学院 情報学環 学際情報学府
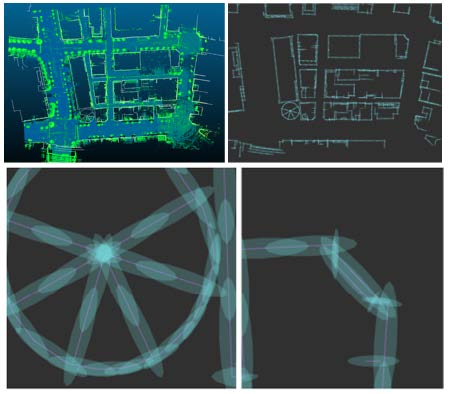
完全自動運転実現のための信頼度付き自己位置推定の提案
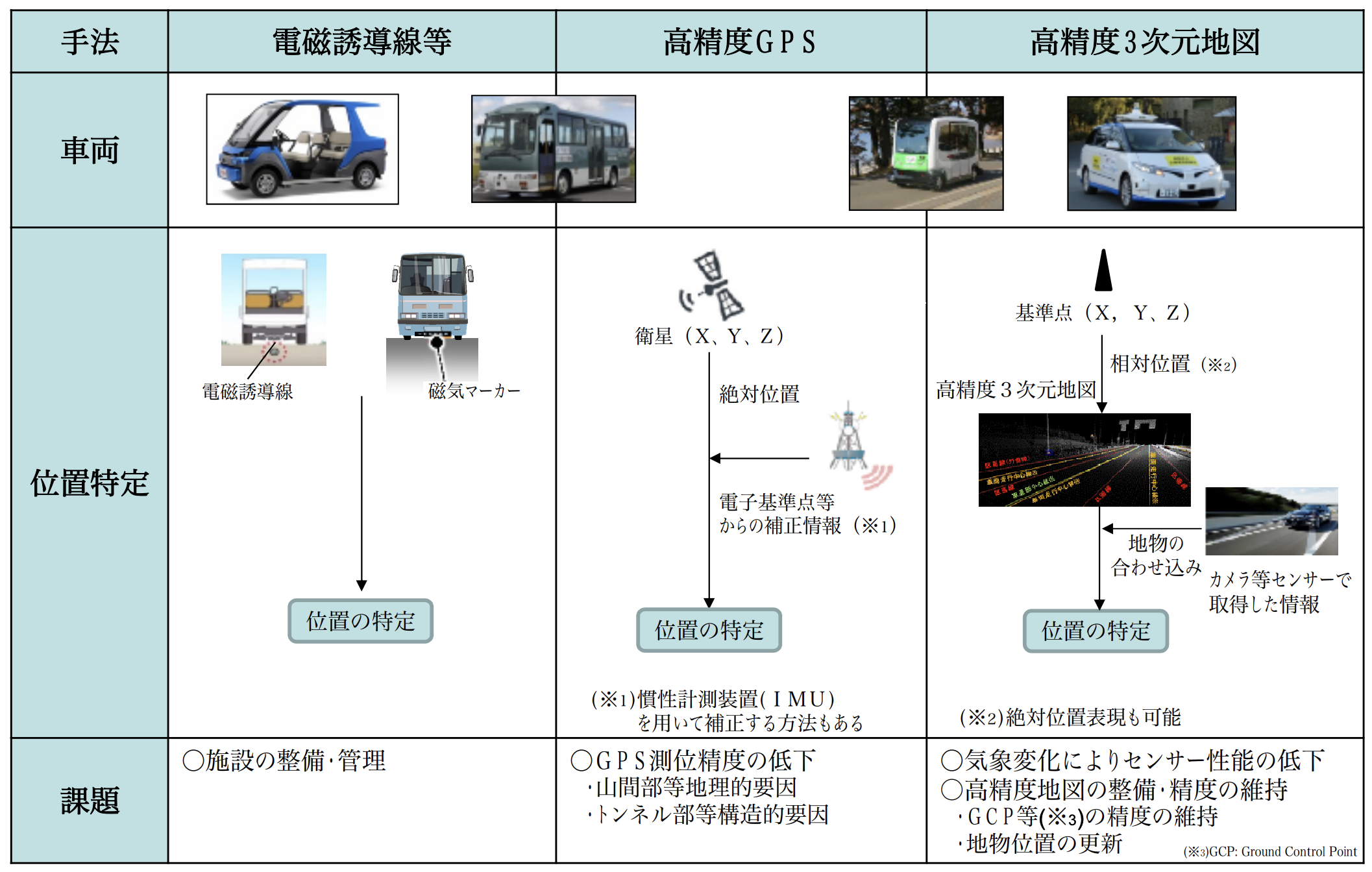
自動運転車の位置特定 3つの手法とそれぞれの弱点まとめ 電磁誘導線 高精度gps 高精度3次元地図 自動運転ラボ
研究紹介 自動運転の自己位置推定とデジタル地図に関する研究 上條俊介准教授 東京大学大学院 情報学環 学際情報学府
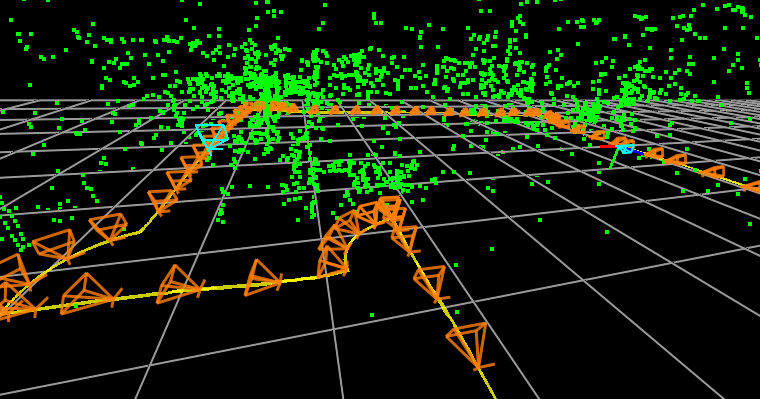
Slamとは 位置特定と自動運転地図の作成を同時に 自動運転ラボ
Tags:
Archive





